Loading...
Searching...
No Matches
R3BFTCalEngine.h File Reference
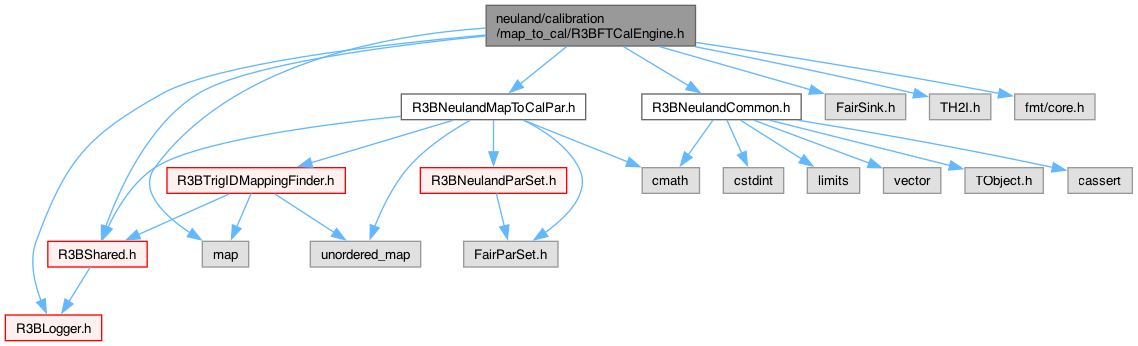
#include "R3BNeulandMapToCalPar.h"#include <R3BLogger.h>#include <R3BNeulandCommon.h>#include <R3BShared.h>#include <TDirectory.h>#include <TH1.h>#include <TH2.h>#include <cstdint>#include <fmt/core.h>#include <map>#include <memory>#include <string>#include <string_view>#include <utility>#include <vector>
Include dependency graph for R3BFTCalEngine.h:
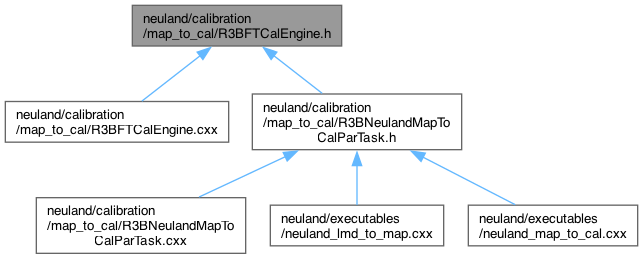
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | R3B |
| namespace | R3B::Neuland |
| Simulation of NeuLAND Bar/Paddle. | |
| namespace | R3B::Neuland::calibration |
Enumerations | |
| enum class | R3B::Neuland::calibration::FTCalErrorMethod : uint8_t { R3B::Neuland::calibration::exact , R3B::Neuland::calibration::approx , R3B::Neuland::calibration::uniform_only , R3B::Neuland::calibration::none } |
Functions | |
| auto | R3B::Neuland::calibration::FTType2Str (FTType type) -> std::string_view |